
本文作者:张林成、王婵
3月20日一早,
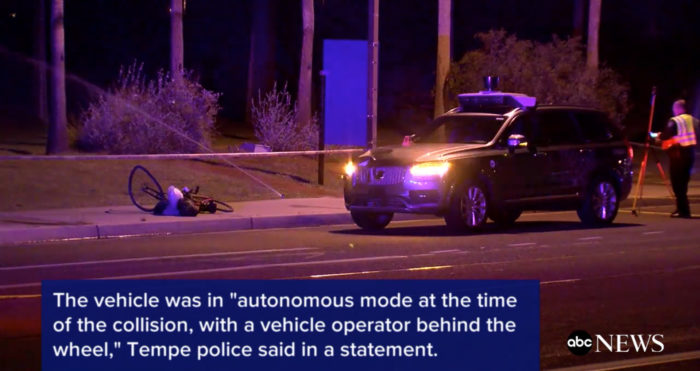
Uber主动驾驭轿车撞死行人
的新闻开端刷屏,这让不少对这个职业抱有活跃希望的大众意识到一个现实:主动驾驭技能还远未老练。据了解,Uber 涉事车辆在产生事端时处于主动驾驭形式,车上有一名安全员司机。当天黄昏,受害人推着自行车,从十字路口人行横道外穿过大街时,遇到碰击。事端产生时,受害人并未走人行横道(事端产生地址间隔人行横道约100码),而Uber 主动驾驭轿车以及车内的安全员司机均未及时减速。
该安全员司机标明,其时事情产生的太忽然,受害人忽然就呈现在他们前方,司机收到的第一个交通事端警报是磕碰的声响。而警方在看过车载录像后也以为,Uber方面或许并不存在差错,“在观看过车载录像之后,咱们发现不管处于哪种形式,本次磕碰都难以避免,由于受害人是从暗处忽然闯入机动车道的。”警方为此特别提示行人黄昏最好通过照明状况杰出的人行横道穿过马路,并标明运用人行横道肯定能约束这种事再次产生。
尽管本次事情的责任方或许不在Uber,但“全球主动驾驭轿车撞死行人第一案”关于整个职业的消极影响或许是极大的。稀有据统计称,人类驾驭员均匀每驾驭6000万英里就会就会产生一同丧命事端,因而,一般以为要检测主动驾驭轿车的安全性,其路测至少应该到达6000万英里左右。可是Uber只是才路测了200多万英里便现已撞死了一名行人。实践上,就算再加上谷歌兄弟公司Waymo 500万英里的路测数据,现在的主动驾驭路测路程数也远不及6000万英里。
主动驾驭出事端现已不是一两次
在49岁的恩赫茨伯格女士不幸地成为世界上第一个被主动驾驭轿车夺去生命的行人之前,这一前锋技能实践上现已屡次在路途上引起或大或小的各种费事。
最早的一次事端能够追溯到2016年1月20日,事发路段为京港澳高速河北邯郸段,一辆特斯拉轿车直接撞上一辆正在作业的路途清扫车,司机典雅宁不幸身亡。查询发现车辆在案发时正处于主动驾驭状况。
2016年可谓主动驾驭技能开展史上的艰屯之际。当年5月,一辆处于主动驾驭状况的特斯拉再次在佛罗里达州卷入了一场事端之中,成果司机丧生。四个月后,又是一辆特斯拉 Model S 电动轿车
在荷兰产生事端
,撞上了路旁边的大树,驾车的荷兰男人当场逝世。尽管事端车辆在事发时并没有运用 Autopilot 主动驾驭体系,但仍然使当日的特斯拉股价受到了影响。处于舆论压力和安全性质疑之下的特斯拉公司声称,主动驾驭形式只是供给驾驭辅佐,并不能够彻底替代司机的责任,司机应该随时做好人工接手操作的预备。其现在所能完成的,只是是暂时替代司机的作用,使旅途变得不那么劳累。别的,特斯拉也发布了新版 Autopilot,能够让司机愈加难以忽视正告,把手放在方向盘上。假如司机忽视正告,轿车将会主动停下来。
尽管此类事端现已引来了不少质疑之声,但在刚刚曩昔的一年里,各家主动驾驭公司仍然在活跃又慎重地测验把他们的车开到更远的当地去。2017 年7月,李彦宏乘主动驾驭轿车上了北京市五环路,尽管没遇到事端,但却引来了交警的一张罚单。8月,由随车司机操控的
Waymo主动驾驭轿车剐蹭了一辆 2006 款奥德赛的前挡泥板
。本年2月,TechCrunch的记者还在一辆通过改装的现代 Genesis(车上装备由无人驾驭体系创业公司 Phantom AI 开发的技能)上,与两位 Phantom AI 团队成员一同亲历了一场追尾
。影响主动驾驭安全性的要素或许有哪些?
1、怎样处理实在杂乱场景
针对这个问题,
驭势科技CEO吴甘沙其实早在上一年就已与动点科技的记者有过沟通
。传统主动驾驭企业都会挑选在一个比较抱负的试验环境下做测验,作用或许会很好,可是在实在杂乱环境下或许就不行了。吴甘沙以为这就好比是练拳击,只是跟木头人练拳练得再好,也很难真实与人奋斗。
“这就意味着人工智能首先要了解当时的态势,能够判别当时的风险程度是多大,然后人工智能还要猜想对方的动机,以此做出风险程度最小的应对办法。”
实践上,
Roadstar
首席科学家周光也置疑,此次Uber事端产生的原因或许就在于AI没能成功猜想行人动机。“不太或许是感知出了问题。Uber的车辆均安装了高线数激光雷达,在硬件不出问题的状况下,这个间隔,行人肯定是能够检测出来的。”周光猜想,多半是车辆在后面的决议计划过程中呈现了问题。比方以为该行人不太或许直接进入车道等等,可是人的行为是很难猜想的。2、人工智能的鲁棒性
鲁棒性,即体系在反常和风险状况下能够持续正常运转的才能。智能驾驭涉及到用户的生命财产安全,所以对鲁棒性要求很高。
一架飞机的软件测验和验证本钱挨近其总本钱的一半,而一辆奔驰 S 级轿车上的代码量是波音 787 愿望客机代码量的 16 倍。因而,吴甘沙以为,主动驾驭企业在轿车软件方面再怎样花时间和金钱打磨都不为过。
“各国主动驾驭企业在快速开展,但在商业化过程中不能过于急进。咱们在拥抱科技立异的一起,也需求对轿车产业的原有规则具有敬畏之心。”关于Uber的此次事端,吴甘沙反思说。
3、练习数据仍然不行
传统的主动驾驭计划是针对每一个场景,都专门编写一套怎样应对的程序。比方编写一个程序,要求主动驾驭轿车遇到红灯时便主动泊车。可是,由于路途环境过分杂乱,一个个地编写程序过分困难,所以便有了深度学习这条主动驾驭的新路。
而众所周知,深度学习需求许多的数据来“喂”,并且关于“许多”怎样量化,业界也一向没有公认的答案,大部分公司只会说“越多越好”。并且值得一提的是,现在的深度学习并没有“触类旁通”的才能,也便是说,即便你成功练习了车辆辨认功用,但当主动驾驭轿车被一个比如快递盒等未学习过的物品挡住的时分,这辆车或许仍然会手足无措。
4、数据交融计划的差异性
现在,简直一切的主动驾驭企业都在选用多传感器交融的计划做主动驾驭,以增强体系的稳定性,避免单一传感器失效之后或许呈现的事端。但许多人并不知道,数据层面其实也是能够交融的,数据交融能进步主动驾驭的安全性。
详细来说,数据交融又能够分为前交融以及后交融,前交融是指从原始数据层面,对多传感器数据进行交融,然后交融则是指在各个传感器的信息都各自处理完了之后再交融。后交融的完成比较简单,但会导致许多细节信息的丢掉。
“可是,大都无人驾驭公司选用不交融或许后交融的感知计划,导致原始数据信息量的下降。并导致检测间隔过近,甚至会呈现漏检的状况。”Roadstar合伙人周光以为这也或许导致安全隐患。
5、其他
别的,海高轿车CEO徐超弥补标明,传感器、算力、算法、履行机构和操控精度等都是瓶颈。
其间,关于履行机构和操控精度,徐超标明现在主动驾驭轿车在这方面远远没有到达超过人的程度,“由于,人对车的操控是有动态调整。”
徐超介绍,履行机构和操控精度的缺乏,在轿车傍边其实适当显着,并且形成这种现象的原因并非是详细的机电操控体系达不到所要的精度,而是由于各部件的制作安装工艺的差异,拼装空隙,底盘悬挂和轮胎的非刚性特征,导致实践履行精度远远达不到指令要求的目标值。“并且,这部分往往对错车辆工程专业布景的主动驾驭团队所忽视的。”
徐超标明,人之所以能够在这种不精准中正常驾驭传统轿车,主要原因便是人在驾驭操作过程中,能够不断的进行“高速闭环批改”。“这样尽管操控履行精度没有提高,但批改的作用会十分不错。”徐超以为这种批改才能正是现在主动驾驭轿车所缺失的。
关于传感器,徐超标明:“不管视觉毫米波仍是激光,和人类和其他生物比较,都有十分大的距离。”不过,徐超标明这种距离未来或许能够以网联体系来逐步消除。
Uber事端给主动驾驭带来了什么
事端产生后,Uber 紧迫暂停了在坦佩、匹兹堡、旧金山和多伦多等城市进行的一切主动驾驭轿车测验。
并且这一事情也有或许致使相关部分收紧关于主动驾驭轿车的监管。据《连线》报导,美国参议员理查德·布卢门撒尔在一份声明中就标明,“这一凄惨事情清楚标明,关于让乘客,行人和司机共享美国路途的真实安全之前,主动驾驭轿车技能还有很长的路要走……咱们急于立异,但咱们也不能忘掉根本安全。”
通过了这次血的经验,持续支撑主动驾驭技能看起来更像是一个痛定思痛的反思。“这次事端恰恰说明晰人开车不安全。由于安全员在这个状况下,做出了(与机器)相同的判别,(因而)才没有进行接收,并导致事端产生。”周光以为无人驾驭的最终目标,是要使机器做出优于安全员的判别。
相关阅览: 《主动驾驭圈地赛》